本篇目录:
- 1、mg995舵机的驱动电流是多少?mg995舵机是不是不能转到180度?
- 2、攀爬车舵机选择90度还是180度
- 3、关于舵机的问题,求解!在线等!!
- 4、探索者M01标准舵机转动角度多少
- 5、舵机可以实现几个角度
mg995舵机的驱动电流是多少?mg995舵机是不是不能转到180度?
1、通常的舵机都是5V或6V供电,但转过的角度是脉宽来控制的。周期20ms,脉宽0.5~5ms的方波,对应0~180度。舵机工作原理:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。
2、电流是变化的,和速度有关系,速度快,消耗的电流就大。200ma左右基本正常。主要是你的控制信号的频率,不能太快,太快,反而无力。你把频率调低,然后看看。还有就是2个同时工作时候,注意有没有接反。
-图1")
3、可控角度范围:MG996R舵机可以在0到180度的范围内连续移动,而MG995舵机则可以连续旋转360度。总之,根据您的项目需求选择合适的舵机。
4、在一般的使用情况下,舵机的电压范围为8V到6V左右。当然,在一些特殊的情况下,比如一些大型机器人或者航模等,也可能需要更高的电压才能驱动舵机。
5、MG995这个舵机是一个模拟舵机,它有3条线,其中两条为电源线,一条为信号线。控制舵机最关键的就是需要用单片机的管脚产生一个周期为20ms的方波周期信号,其中高电平的持续时间为0.5ms~5ms。
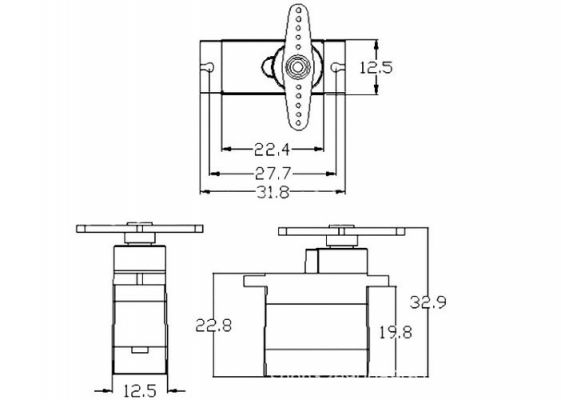
-图2")
攀爬车舵机选择90度还是180度
1、攀爬车舵机的好处是修正转向。根据查询相关公开信息显示,攀爬车舵机是通过感应侧向加速度信号的改变,来干预舵机,从而修正转向。舵机是指在自动驾驶仪中操纵飞机舵面(操纵面)转动的一种执行部件。
2、控制和操纵的重要设备。舵机行程用遥控带才能设置舵机行程,将其装载攀爬车上可以控制和操纵,是一个重要的设备。攀爬车是一种可以通过无线电遥控器远程控制的模型汽车。
3、大于等于90度。对于玩车来说,购买航模舵机大于等于90度的舵机都是没有问题的。航模舵机是航模飞机控制动作的动力来源。
-图3")
4、其次,舵机的转动角度精度受多种因素影响。其中,位置反馈传感器的精度是影响舵机转动角度精度的重要因素之一。目前市场上常见的舵机精度为1-2度,而高端品牌舵机的精度可以达到0.5度甚至更高。
5、度。普通舵机是输入周期20ms的PWM波,占空比0.5ms到5ms对应0度到180度,不能超出这个,不然舵机就拐向死角,选择180度的能最大限度的满足需求。
关于舵机的问题,求解!在线等!!
1、力矩是肯定能保持的,舵机就是舵机,伺服电机是伺服电机。他们内部结构差不多。用起来的区别就是,舵机转动范围是0~180度,而伺服电机能够朝一个方向连续转动(就像直流电机)。
2、舵机机械结构问题:舵机的机械结构可能存在问题,例如舵机齿轮损坏、齿轮松动、轴承磨损等,导致舵机的转动不平稳,影响舵机的行程。舵机安装问题:舵机的安装位置不当或者安装方式不正确,可能会导致舵机的行程不一致。
3、过热故障:由于工作时间过长等原因,舵机内部的电路和电机会变得过热,导致舵机性能下降、电机温度升高等现象。一般采取降低负载、升高供电电压、增加散热器等方式进行解决。
4、比较法:使用同型号的舵机,与被检修的舵机作比较,找出故障的部位,这种方法叫比较法。检修时可将两者对应点进行比较,在比较中发现问题,找出故障所在。
5、电源不足,多路舵机需要电流才能正常工作,使用的电源电压过低或者过载,会导致舵机无法稳定运行或者无法运动。
6、你接一百个舵机,电压也是一样。所以,舵机的负载就是电流的原因了,电流直接关系就是电源的电流大小,解决方法就是换高倍率的电池。一般电调只能供给4-5个舵机。。
探索者M01标准舵机转动角度多少
1、舵机角度计算公式是:$angle = (pulseWidth - 500) \times 180^\circ / 2000^\circ$简单地说,舵机控制信号的脉宽范围一般是500到2500微秒,对应舵机角度范围一般是0到180度。
2、其次,舵机的转动角度精度受多种因素影响。其中,位置反馈传感器的精度是影响舵机转动角度精度的重要因素之一。目前市场上常见的舵机精度为1-2度,而高端品牌舵机的精度可以达到0.5度甚至更高。
3、由于机械结构的限制,舵机通常只能在0-180度范围转动。可以在这个范围内正转和反转。对于你描述的这种PWM的角度控制来说,应该是每个脉冲宽度对应一个角度,是绝度位置。
舵机可以实现几个角度
舵机角度计算公式是:$angle = (pulseWidth - 500) \times 180^\circ / 2000^\circ$简单地说,舵机控制信号的脉宽范围一般是500到2500微秒,对应舵机角度范围一般是0到180度。
舵机接收到控制信号后,舵机内部的电路通过脉冲宽度调制(PWM)的方式将信号转化为旋转角度。
°。舵机内部带有一个电位器,其旋转角度和控制脉冲输入脉宽有关,可以旋转360°。舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。舵机是船舶上的一种大甲板机械。
舵机的位置等级一般有1024个,其控制的角度精度是可以达到180/1024约0.18度。从时间上看脉宽控制精度为2000/1024约2us。(因为5ms-5ms=2ms)。换句还说,高电平2us(或者0.18°)为1个位置等级。
其次,可以进行实际测试,比如利用专业的测试仪器进行测试,或者利用简单的自制工具进行角度测量。总的来说,舵机的转动角度精度是一个重要的技术指标,不同品牌和型号的舵机精度有所差异。
直流舵机通常可以实现转动的角度控制,但无法进行精准的位置定位。而伺服舵机则可以实现角度、速度、位置的精准控制,其控制精度比直流舵机要高。最后,我们来谈谈舵机的控制方式。舵机的控制方式可以通过PWM信号的控制来实现。
到此,以上就是小编对于舵机的实际转动角度是否能与理论计算结果一致的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏