本篇目录:
- 1、PID电路的传递函数详细求解过程
- 2、...PID的参数怎么求得使系统稳定。传递函数以及仿真框图在图中,望大神...
- 3、PID的计算公式
- 4、pid控制器的传递函数标准形式是什么?用kp.ki.kd表示的。
PID电路的传递函数详细求解过程
设Kp= Ti= 0.01,讨论Td= 10 ~ 100 时对系统阶跃响应曲线的影响。输人信号阶跃函数,分别进行仿真,如图5 所展示的系统的阶跃响应曲线。
位置式=增量式的积分。位置式PID与过去输出状态量都有关;增量式PID只与现在和过去两个状态(即一共三个状态量)有关。执行器自带积分是指执行器输入为0时,执行器控制量输出是否能回到原位置(即是否有记忆性)。
-图1")
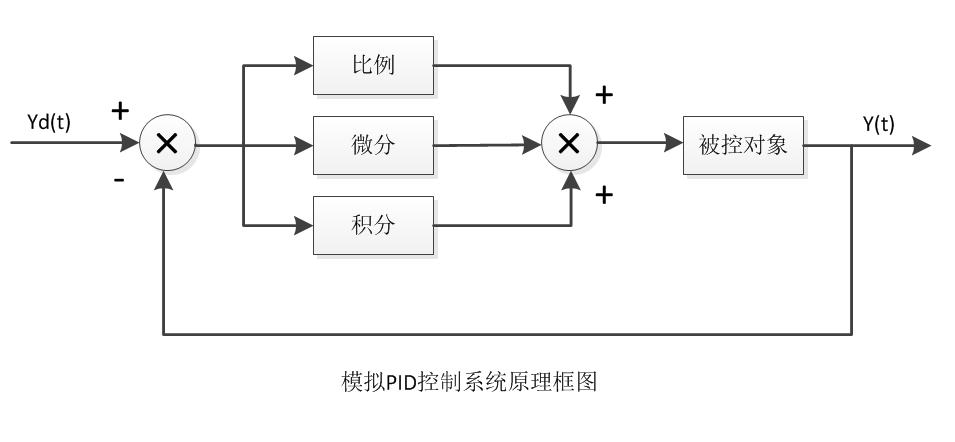
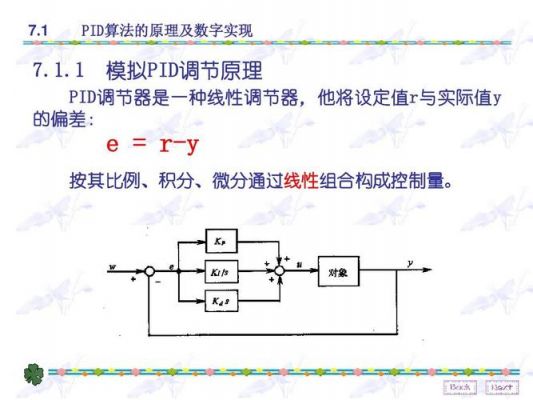
PID控制器由比例单元(P)、积分单元(I)和微分单元(D)组成。其输入e (t)与输出u (t)的关系为 因此它的传递函数为:它由于用途广泛、使用灵活,已有系列化产品,使用中只需设定三个参数(Kp, Ki和Kd)即可。
Ziegler-Nichol响应曲线法,根据被控对象的阶跃响应曲线获取被控对象的模型式(1),根据模型的增益K,时间常数T以及纯滞后时间,再利用如下的经验公式(2)整定PID控制器参数。一般来说由于Z-N整定的PID控制器超调较大。
输入的是指令,输出的是执行的情况。传递函数反应的是系统的特性,也就是,你加指令之后,它并不怎么听话,就是用传递函数来描述的。通过施加控制,使得它的执行情况得以改善,你就达到目的了。
-图2")
结合实例就说来话长了,恐怕要给你一篇论文啦,呵呵,即便是要讲清楚PID调节器,也要上千字才行啊。补充:各个单元都可以求出【传递函数】,须用到【拉普拉斯变换】的知识。
...PID的参数怎么求得使系统稳定。传递函数以及仿真框图在图中,望大神...
1、为了使控制系统满足性能指标要求,PID 控制器一般地是依据设定值与实际值的误差,利用比例(P)、积分(I)、微分(D)等基本控制规律,或者是三者进行适当地配合形成相关的复合控制规律,例如,PD、PI、PID 等。
2、具体步骤如下: 首先给大家简单介绍一下PID:PID就是通过系统误差利用比例、积分、微分计算出控制量进行控制的。不同厂家的公式稍有不同,但是基本上都离不开三个参数:比例、积分时间、微分时间。
-图3")
3、PID=Uk+KP*【E(k)-E(k-1)】+KI*E(k)+KD*【E(k)-2E(k-1)+E(k-2)】PID算法具体分两种:一种是位置式的 ,一种是增量式的。
4、但无论采用哪一种方法所得到的控制器参数,都需要在实际运行中进行最后调整与完善。现在一般采用的是临界比例法。
PID的计算公式
PID控制器的输出为:误差乘比例系数Kp+Ki*误差积分+Kd*误差微分。Kp*e + Ki*∫edt + Kd*(de/dt) (式中的t为时间,即对时间积分、微分)上式为三项求和。
PID控制器由比例单元(P)、积分单元(I)和微分单元(D)组成。
PID增量式算法 离散化公式:△u(k)= u(k)- u(k-1)△u(k)=Kp[e(k)-e(k-1)]+Kie(k)+Kd[e(k)-2e(k-1)+e(k-2)]进一步可以改写成 △u(k)=Ae(k)-Be(k-1)+Ce(k-2)。
换句话说,通过增量PID算法,每次输出是PWM要增加多少或者减小多少,而不是PWM的实际值。所以明白增量式PID就行了。
pid控制器的传递函数标准形式是什么?用kp.ki.kd表示的。
采用的形式为G(z)=Kp+Ki*(1/z)+Kd*(z-1)/z。Kp、Ki、Kd分别表示PID控制器的比例增益、积分增益和微分增益,z表示离散时间域上的复变量。
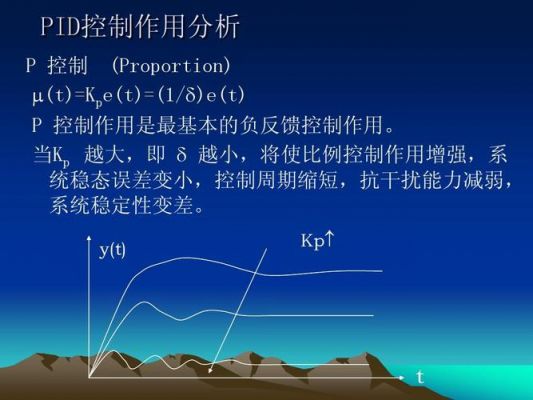
Kp是比例调节系数,在PID调节器中起到加快系统的响应速度,提高系统的调节精度,快速调节误差的作用。Ki是积分调节系数,在PID调节器中起到消除残差,调节稳态时间的作用。
PID控制器由比例单元(P)、积分单元(I)和微分单元(D)组成。其输入e(t)与输出u(t)的关系为因此它的传递函数为:它由于用途广泛、使用灵活,已有系列化产品,使用中只需设定三个参数(Kp,Ki和Kd)即可。
到此,以上就是小编对于pid控制系统的传递函数的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏