本篇目录:
- 1、pid怎么调节
- 2、PID控制器的调试方法
- 3、怎样迅速调好PID参数?
- 4、PID的调节步骤分几步?
pid怎么调节
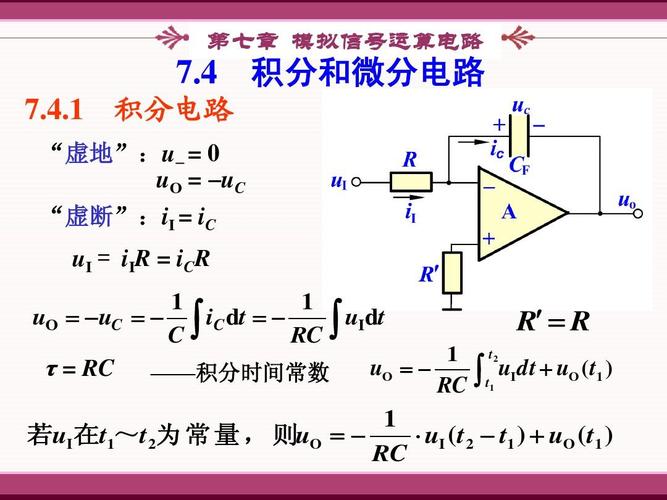
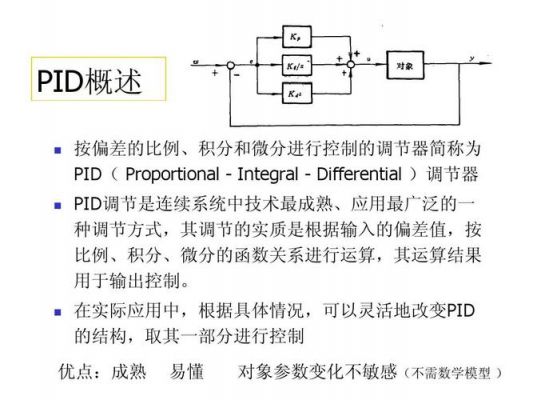
P.I.D 调节(控制)参数的人工整定 经验参数和各种调节系统中P.I.D参数可参照以下经验数据设置。
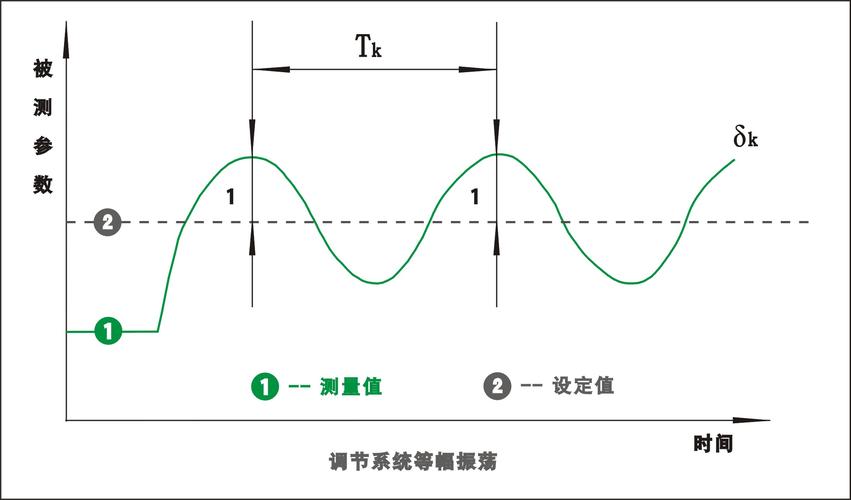
调节方法:现场凑试法:温度PID确定一个调节器的参数值PB和Ti,通过改变给定值对控制系统施加扰动,现场观察判断控制曲线形状。
-图1")
确定微分时间常数Td微分时间常数Td一般不用设定,为0即可,此时PID调节转换为PI调节。如果需要设定,则与确定Kp的方法相同,取不振荡时其值的30%。
死区。死区在PID调节是一个非常重要的量,可以人为地增加控制回路的稳定性,设置好死区甚至可以减少大量的调整过程。通俗的理解死区就是你所能接受的最大偏差。死区的大小一般要大于反馈值的波动范围。
PID控制器的调试方法
pid三个参数的调整方法如下。响应缓慢,可增大Kp。快速振荡,可减小Kp。超调大,波动漫,可增大Ti。负载波动时,静差大,回复慢,可增大Kp。负载波动时,静差大,回复慢,可减小Ti。
-图2")
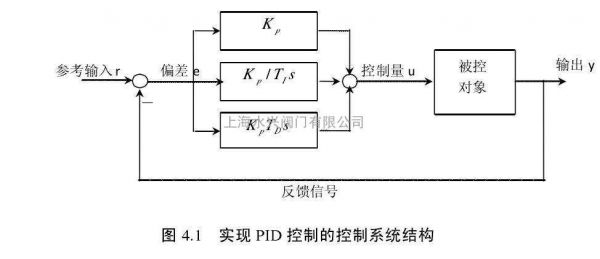
PID控制器参数选择的方法很多,例如试凑法、临界比例度法、扩充临界比例度法等。但是,对于PID控制而言,参数的选择始终是一件非常烦杂的工作,需要经过不断的调整才能得到较为满意的控制效果。
在整定PID控制器参数时,可以根据控制器的参数与系统动态性能和稳态性能之间的定性关系,用实验的方法来调节控制器的参数。有经验的调试人员一般可以较快地得到较为满意的调试结果。
温度T:P=20-60%,T=180-600s,D=3-180s,压力P:P=30~70%,T=24~180s。液位L: P=20-80%,T=60-300s,流量L:P=40-100%,T=6-60s。
-图3")
例如,如果输入偏差值线性变化,则在调节器输出侧叠加一个恒定的调节量。大部分控制系统不需要调节微分时间。因为只有时间滞后的系统才需要附加这个参数。如果画蛇添足加上这个参数反而会使系统的控制受到影响。
怎样迅速调好PID参数?
1、加大比例度或积分时间。P.I.D 调节(控制)参数的人工整定 经验参数和各种调节系统中P.I.D参数可参照以下经验数据设置。
2、确定微分时间常数Td微分时间常数Td一般不用设定,为0即可,此时PID调节转换为PI调节。如果需要设定,则与确定Kp的方法相同,取不振荡时其值的30%。
3、PID控制器参数选择的方法很多,例如试凑法、临界比例度法、扩充临界比例度法等。但是,对于PID控制而言,参数的选择始终是一件非常烦杂的工作,需要经过不断的调整才能得到较为满意的控制效果。
4、pid三个参数的调整方法如下。响应缓慢,可增大Kp。快速振荡,可减小Kp。超调大,波动漫,可增大Ti。负载波动时,静差大,回复慢,可增大Kp。负载波动时,静差大,回复慢,可减小Ti。
5、若曲线不够理想,可改变PB或Ti,再画控制过程曲线,经反复凑试直到控制系统符合动态过程品质要求为止,这时的PB和Ti就是最佳值。如果调节器是PID三作用式,那么要在整定好的PB和Ti的基础上加进微分作用。
PID的调节步骤分几步?
1、c.在输出不振荡时,增大微分时间常数Td。2.一般步骤 a.确定比例增益P 确定比例增益P 时,首先去掉PID的积分项和微分项,一般是令Ti=0、Td=0(具体见PID的参数设定说明),使PID为纯比例调节。
2、P.I.D 调节(控制)参数的人工整定 经验参数和各种调节系统中P.I.D参数可参照以下经验数据设置。
3、确定微分时间常数Td微分时间常数Td一般不用设定,为0即可,此时PID调节转换为PI调节。如果需要设定,则与确定Kp的方法相同,取不振荡时其值的30%。
4、死区。死区在PID调节是一个非常重要的量,可以人为地增加控制回路的稳定性,设置好死区甚至可以减少大量的调整过程。通俗的理解死区就是你所能接受的最大偏差。死区的大小一般要大于反馈值的波动范围。
5、下面简单介绍一下调试PID参数的一般步骤:1.负反馈 自动控制理论也被称为负反馈控制理论。首先检查系统接线,确定系统的反馈为负反馈。
6、若曲线不够理想,可改变PB或Ti,再画控制过程曲线,经反复凑试直到控制系统符合动态过程品质要求为止,这时的PB和Ti就是最佳值。如果调节器是PID三作用式,那么要在整定好的PB和Ti的基础上加进微分作用。
到此,以上就是小编对于pid控制电机位置控制的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏