本篇目录:
关于CAN总线的一些问题
1、故障原因分析:CAN总线系统常见的故障原因一般有三种。一是电源故障。由于电源系统电压低,引起控制器无法正常工作,导致无法通讯或CAN超时故障。二是各节点故障。多路信息传输系统连接的各个电控单元发生故障即电控单元本身有故障。
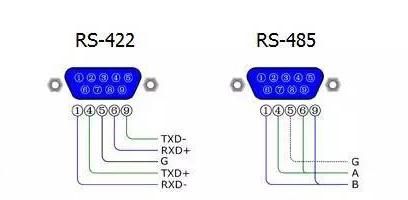
2、can总线故障一般原因导致CAN总线故障通常的原因如下:汽车电源系统引起的故障;汽车CAN总线系统的链路故障;汽车CAN总线系统的节点故障引发。(2)CAN总线故障的原因包括:-CAN-LOW线或CAN-High线的通信线路开路或短路。
-图1")
3、仪表指针不走。问题的可能原因有:仪表不走,液晶显示传感器掉线,传感器坏或者线束错、接口松动;步进电机坏。仪表指示灯不报警及常报警。问题的可能原因有:报警信号线接错或断。发动机启动,水温表不走。
4、(2)CAN总线故障的原因包括:-CAN-LOW线或CAN-High线的通信线路开路或短路。-插头损坏,如接触损坏、脏污和腐蚀。-车辆电源系统中的电压故障,例如由点火线圈损坏或接地连接引起的。-电子控制单元中的通信部件有故障。
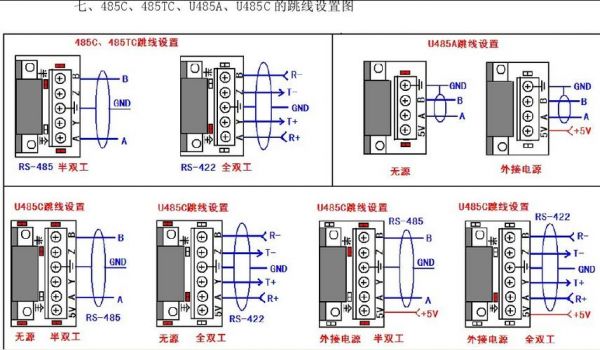
5、它包含了软件故障的问题,即传输协议或软件程序存在缺陷或冲突,会使汽车CAN总线系统的通信混乱或无法工作,而这些问题大多会成批出现。硬件故障多为电子控制模块芯片或集成电路,导致汽车CAN总线系统无法正常工作。
-图2")
6、把每一个节点依次往CAN总线上面连接,接一个节点后观察并测试通信状况。
CAN通讯中单滤波和双滤波有什么区别?
滤波器类型:单极滤波器是一种一阶滤波器,而双极滤波器是一种二阶滤波器。单极滤波器只有一个滤波极点,而双极滤波器有两个滤波极点。 频率响应:由于双极滤波器具有更多的自由度,它能够提供更灵活的频率响应。
双π接入无缘滤波与单π无缘滤波区别在于装置不同、造价不同、电流不同。装置不同:有源滤波器是电子装置,而无源滤波器是机械的。
-图3")
CAN的广播信号是通过双滤波实现的。单滤波是不能实现。
在我的认知范围里,一般情况下双通道的CANBUS通讯卡确实要优于单通道的,当然,这必须是同一品牌的对比。如果跨品牌了,谁好谁差还真的不一定。
双边滤波器顾名思义比高斯滤波多了一个高斯方差sigma-d,它是基于空间分布的高斯滤波函数,所以在边缘附近,离的较远的像素不会太多影响到边缘上的像素值,这样就保证了边缘附近像素值的保存。
相较之下,CAN总线和以太网之间互相转换就不用考虑带宽的问题,因为以太网的数据传输速度比CAN总线还要高。当然,如果的工作有滤波要求的话,该滤波就滤波。
请问232can协议转换器使用时为何要进行滤波呢?
我们在使用CAN转232转换器之前,肯定是要熟读说明书的。这个时候,我们往往发现,设备串口端可支持的通讯速率远远低于CAN端。
当数据转换方向是由串口转向CAN的,那我们无需进行滤波设置,因为数量较少的232数据会全部转换成CAN数据。
如果你想正常的实现串口数据与CAN总线数据之间的转换,如果你不想在数据转换的时候发生丢帧现象,那滤波设置是必须的,滤的是CAN总线端的波。
所谓滤波,就是根据某些规则限制,减少单位时间里数据的总流通量。我们知道,相较于串口总线,CAN总线的通讯速率快得多,单位时间里经过的数据量也多。如果不对CAN端进行限制的话,串口端是没办法全部实时消化转换的。
CAN的基本组成?
CAN-BUS系统主要包括以下部件:CAN控制器、CAN收发器、CAN-BUS数据传输线和CAN-BUS终端电阻. 1.CAN控制器,CAN收发器CAN-BUS上的每个控制单元中均设有一个CAN控制器和一个CAN收发器。
CAN总线:CAN总线是五点控制器局域网CAN中最核心的组件之一,它负责连接整个控制系统,实现各个节点之间的通信。
CAN由每个ECU内部的CAN控制器和收发器、每个ECU外部连接的两条CAN总线和整个系统中的两个终端组成。
到此,以上就是小编对于can标准帧范围的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏