本篇目录:
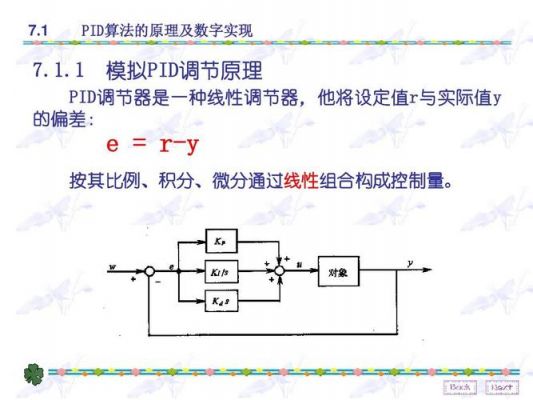
PID调节器的原理是什么?
PID是比例、积分和微分三部分作用的叠加的复合控制。特点:在比例作用的基础上能提高系统的稳定性,加上积分作用能消除余差,又有δ、TI、TD三个可以调整的参数,因而可以使系统获得较高的控制质量。
PI调节是一种线性控制,它根据给定值与实际输出值构成控制偏差,将偏差的比例和积分通过线性组合构成控制量,对被控对象进行控制。
-图1")
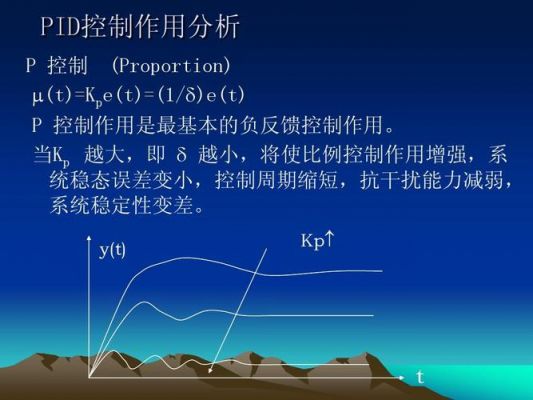
PID控制的基本原理包括比例控制、积分控制和微分控制。比例控制(P控制)比例控制是根据实际输出值与预期输出值之间的误差信号,按比例调整控制输出值,以实现对控制精度的提高。
PID的原理是:通过摆杆反馈的位置信号实现同步控制。收线控制采用实时计算的实际卷径值,通过卷径的变化修正PID前馈量,可以使整个系统准确、稳定运行。
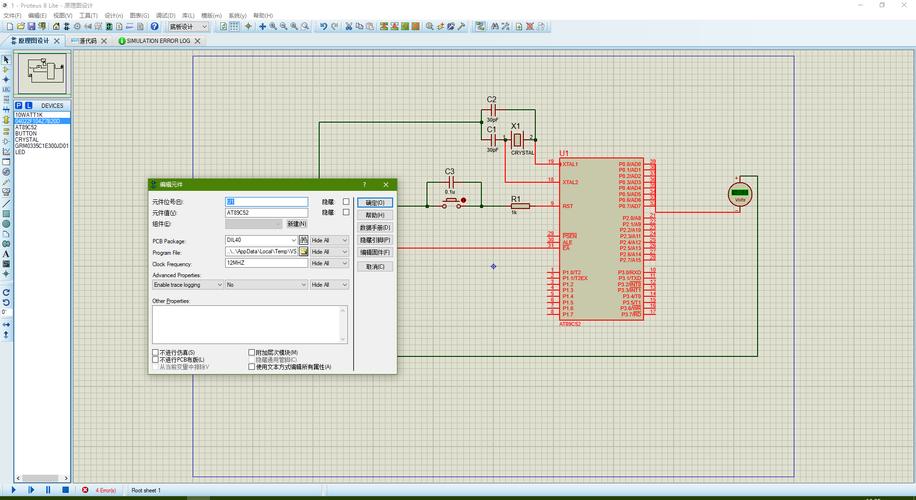
位置式pid控制算法
1、PID=Uk+KP*【E(k)-E(k-1)】+KI*E(k)+KD*【E(k)-2E(k-1)+E(k-2)】PID算法具体分两种:一种是位置式的 ,一种是增量式的。
-图2")
2、控制点包含三种比较简单的PID控制算法,分别是:增量式算法,位置式算法,微分先行。 这三种PID算法虽然简单,但各有特点,基本上能满足一般控制的大多数要求。
3、(1)数字PID位置型控制算法:由于计算机输出的u(k)可直接控制执行机构(如阀门),u(k)的值和执行机构的位置(如阀门开度)是一一对应的,因此通常称该公式为位置式PID控制算法。
4、位置型算法用到过去的误差的累加,容易产生较大的累加误差。(2)增量型算法得出的是控制的增量,不会影响系统的工作。
-图3")
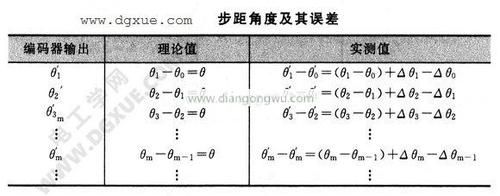
PLC用PID功能控制步进电机角位移?
PLC对步进电机也具有良好的控制能力,利用其高速脉冲输出功能或运动控制功能,即可实现对步进电机的控制。步进电机是一种低转子惯量、高定位精度、小误差、控制简单的电机,是运动控制领域的主要执行元件之一。
步进电机所带的旋转负载应该安装有 角度传感器。这类角度控制 精度不需要很高。可以使用PLC自带的PID指令来控制。
每次输入电脉冲时,电机旋转一个角度前进一步。其输出角位移与输入脉冲数成正比,转速与脉冲频率成正比。改变绕组通电和电机反转的顺序。因此可以通过控制电机各相绕组的脉冲数、频率和功率序列来控制步进电机的旋转。
步进电机是一种可以将其驱动至所需位置的电机,它可以通过控制器进行精确的控制,包括角位移和转速等参数。控制步进电动机的角位移和转速主要通过控制器来实现。控制器会根据输入的脉冲信号来控制步进电机的角位移和转速。
模型预测电机转速。步进电机使用过程中,除了可以用编码器,还可以用模型预测电机转速和位置,并根据预测结果调整参数,实现pid调速控制。步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。
pid控制的基本原理
1、PID是比例、积分和微分三部分作用的叠加的复合控制。特点:在比例作用的基础上能提高系统的稳定性,加上积分作用能消除余差,又有δ、TI、TD三个可以调整的参数,因而可以使系统获得较高的控制质量。
2、PID的原理是:通过摆杆反馈的位置信号实现同步控制。收线控制采用实时计算的实际卷径值,通过卷径的变化修正PID前馈量,可以使整个系统准确、稳定运行。
3、PID调节器控制规律为比例、积分、微分控制,简称PID控制,其同时运用了多种计算方法。PD主要是微分控制的性质。PI主要是运用积分控制的性质。
4、微分参数(Kd)是控制器对系统输出变化的反应。它可以提高系统的精确度,但如果调节过大,则可能导致系统的不稳定。PID控制器的工作原理是,首先通过检测系统的输出和预期的目标,计算出误差(error)。
5、微分作用对噪声干扰有放大作用,因此过强 的加微分调节,对系统抗干扰不利。此外,微分反应的是变化率,而当输入没有变化时,微分作用输出为零。微分作用不能单独使用,需要与另外两种调节规律相结合,组成PD或PID控制器。
6、PID控制原理:本系统通过摆杆(辊)反馈的位置信号实现同步控制。收线控制采用实时计算的实际卷径值,通过卷径的变化修正PID前馈量,可以使整个系统准确、稳定运行。
pid怎么调节
1、P.I.D 调节(控制)参数的人工整定 经验参数和各种调节系统中P.I.D参数可参照以下经验数据设置。
2、调节方法:现场凑试法:温度PID确定一个调节器的参数值PB和Ti,通过改变给定值对控制系统施加扰动,现场观察判断控制曲线形状。
3、死区。死区在PID调节是一个非常重要的量,可以人为地增加控制回路的稳定性,设置好死区甚至可以减少大量的调整过程。通俗的理解死区就是你所能接受的最大偏差。死区的大小一般要大于反馈值的波动范围。
4、PID是英文单词比例(Proportion),积分(Integral),微分(Differential coefficient)的缩写。
5、若曲线不够理想,可改变PB或Ti,再画控制过程曲线,经反复凑试直到控制系统符合动态过程品质要求为止,这时的PB和Ti就是最佳值。如果调节器是PID三作用式,那么要在整定好的PB和Ti的基础上加进微分作用。
6、在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。PID控制器(比例-积分-微分控制器)是一个在工业控制应用中常见的反馈回路部件,由比例单元P、积分单元I和微分单元D组成。
到此,以上就是小编对于pid如何整定的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏