本篇目录:
如何实现单片机对舵机的控制?
1、单片机控制步进电机的转动角度控制舵机的转动。可以很精确控制舵的角度。
2、要求,单片机控制舵机,让舵机到中间位置后,左转15度,延迟2ms,右转15度。(度数不要求精确)。舵机为0.5~5ms。是舵机正反转 ,要C的,不要汇编 ,一定是应用定时器来控制脉冲的。
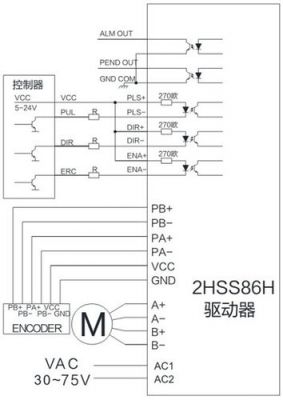
-图1")
3、单片机系统实现对舵机输出转角的控制,必须首先完成两个任务:首先是产生基本的PWM周期信号,其次是脉宽的调整,即单片机模拟PWM信号的输出,并且调整占空比。
4、舵机工作原理 控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。
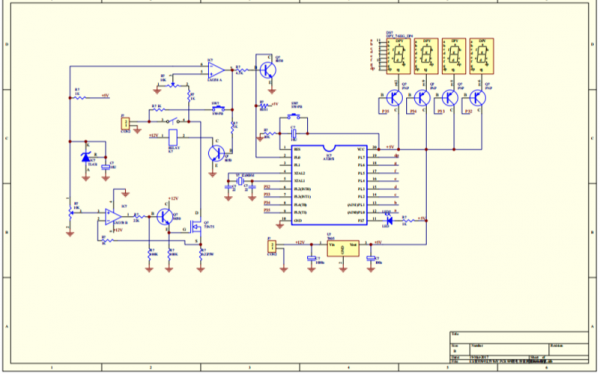
5、给它提供一定的脉宽,它的输出轴就会保持在一个相对应的角度上,无论外界转矩怎样改变,直到给它提供一个另外宽度的脉冲信号,它才会改变输出角度到新的对应的位置上。注意一点是给的信号要保持才能让舵机角度保持。
-图2")
单片机编程控制舵机求救啊啊
你的改变函数里面,有一个地方不够完善:while(!(num==100)); /*延时时间*/ 这种方式属于浪费单片机资源,你不应该在这瞎等待。一般我写多个舵机,我都会让定时器直接处理舵机信息。举个例,少量代码。
单片机,舵机,电源共地;2 用两个稳压芯片进行供电,将电源分开来;3 舵机信号端没有直接连接单片机IO口,我串了一个10K的电阻,也就是这一步之后就可以控制舵机。
单片机完成控制算法,再将PWM信号输出到舵机。发一个自己原来写的简单的。
-图3")
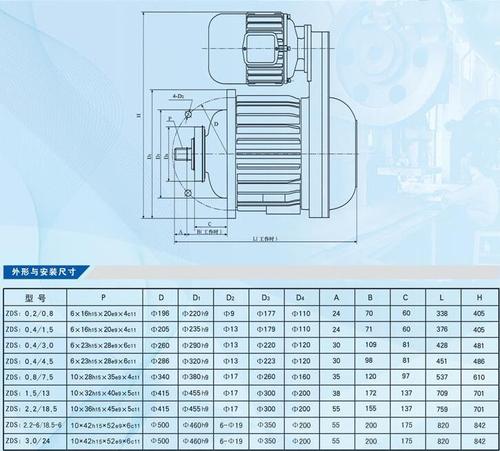
请看图 ,图上标注了角度和脉冲两个参数,你仔细看,每个脉冲宽度对应一个角度,你只要写程序,用单片机给舵机发送图上任意一个有效的固定宽度的脉冲,那么舵机就转到这个脉冲对应的角度上了。
单片机控制舵机的问题?
你好,单片机是无法直接控制舵机的。原因如下:1:单片机io口输出的电流太低,无法全功率驱动电机。2:有些单片机加上拉后输出电流可提高,但舵机属于感性负载,在动作时会产生较大的干扰,影响单片机或者周围元器件的正常工作。
单片机接上舵机就死机解决如下:检查电路连接是否正确且紧固,特别是舵机的电源和控制信号线是否接到正确的引脚。确认使用的电源稳压芯片或模块支持足够的输出电流,并且电源电压符合单片机和舵机的电气参数范围。
排除逻辑故障 这类故障往往由于设计和加工制板过程中工艺性错误所造成的。主要包括错线、开路、短路。排除的方法是首先将加工的印制板认真对照原理图,看两者是否一致。
如一楼所说,电源容量不够,舵机多了,引起电源波动,引起干扰。最好舵机单独供电。
首先检查CPU的三个基本工作条件是否满足?舵机控制电路与开发板电路是一致。
怎么用51单片机控制舵机?
其工作流程为:控制信号→控制电路板→电机转动→齿轮组减速→舵盘转动→位置反馈电位计→控制电路板反馈。流,才可发挥舵机应有的性能。
先别着急调试程序,先用5v电源试试舵机的电机(假如是5V工作的)转不转,如果转,那就用示波器观察一下各引脚是否有波形输出,再就是你驱动电机的电路是否损坏,比如三极管坏了等等。
我认为这种单片机控制舵机应该考虑独立供电设计,中间用光耦彻底隔离,否则舵机动作的时候电流比较大,对单片机会有干扰。当然了,如果高电平时间本来就抖动的话,舵机抖动是必然的,所以首先单片机要输出稳定的PWM波才行。
单片机控制的舵机平衡台怎么编程
1、单片机系统实现对舵机输出转角的控制,必须首先完成两项任务:首先,产生基本的PWM周期信号,即产生20ms的周期信号;其次,调整脉宽,即单片机调节PWM信号的占空比。
2、操作步骤:1 单片机,舵机,电源共地;2 用两个稳压芯片进行供电,将电源分开来;3 舵机信号端没有直接连接单片机IO口,我串了一个10K的电阻,也就是这一步之后就可以控制舵机。
3、请看图 ,图上标注了角度和脉冲两个参数,你仔细看,每个脉冲宽度对应一个角度,你只要写程序,用单片机给舵机发送图上任意一个有效的固定宽度的脉冲,那么舵机就转到这个脉冲对应的角度上了。
4、因为舵机中有电位器,输出5ms宽度的脉冲宽度是正90度,所以你可以写一个for循环,然后引进一个参数,不停地改变0.5ms到5ms之间的脉冲宽度就行了。
5、先别着急调试程序,先用5v电源试试舵机的电机(假如是5V工作的)转不转,如果转,那就用示波器观察一下各引脚是否有波形输出,再就是你驱动电机的电路是否损坏,比如三极管坏了等等。
到此,以上就是小编对于舵机单片机程序的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏