本篇目录:
- 1、PID参数的如何设定调节
- 2、怎样迅速调好PID参数?
- 3、pid参数如何调整
- 4、pid怎么调节
- 5、PID参数怎样调整最佳?
PID参数的如何设定调节
P.I.D 调节(控制)参数的人工整定 经验参数和各种调节系统中P.I.D参数可参照以下经验数据设置。
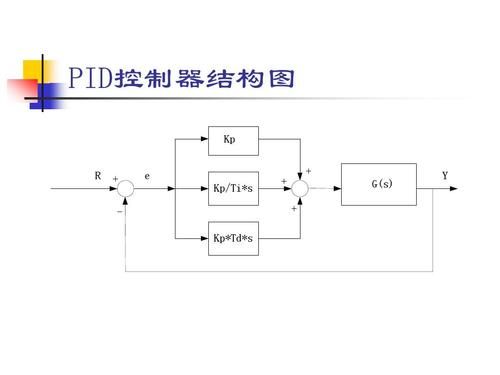
微分作用参数Td的作用是改善系统的动态性能,其主要作用是在响应过程中抑制偏差向任何方向的变化,对偏差变化进行提前预报。但Td不能过大,否则会使响应过程提前制动,延长调节时间,并且会降低系统的抗干扰性能。
-图1")
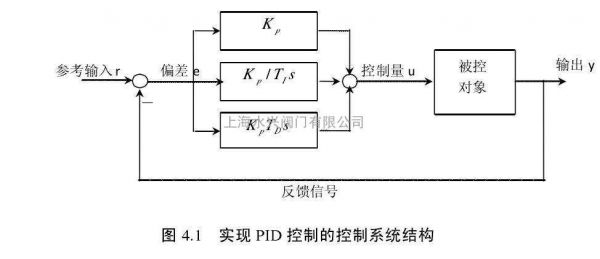
依据经验,一般PID参数确定的步骤如下[42]:\x0d\x0a (1)确定比例系数Kp确定比例系数Kp时,首先去掉PID的积分项和微分项,可以令Ti=0、Td=0,使之成为纯比例调节。
调节方法:现场凑试法:温度PID确定一个调节器的参数值PB和Ti,通过改变给定值对控制系统施加扰动,现场观察判断控制曲线形状。
死区。死区在PID调节是一个非常重要的量,可以人为地增加控制回路的稳定性,设置好死区甚至可以减少大量的调整过程。通俗的理解死区就是你所能接受的最大偏差。死区的大小一般要大于反馈值的波动范围。
-图2")
任何闭环控制系统的首要任务是要稳(稳定)、快(快速)、准(准确)的响应命令。PID调整的主要工作就是如何实现这一任务。以下是个人对PID调整的一点经验和想法。
怎样迅速调好PID参数?
加大比例度或积分时间。P.I.D 调节(控制)参数的人工整定 经验参数和各种调节系统中P.I.D参数可参照以下经验数据设置。
①根据控制对象特性确定好初始的参数值PB、Ti和Td。可参照在实际运行中的同类控制系统的参数值,或参照表3-4-1所给的参数值,使确定的初始参数尽量接近整定的理想值。这样可大大减少现场凑试的次数。
-图3")
PID控制器参数选择的方法很多,例如试凑法、临界比例度法、扩充临界比例度法等。但是,对于PID控制而言,参数的选择始终是一件非常烦杂的工作,需要经过不断的调整才能得到较为满意的控制效果。
pid参数如何调整
加大比例度或积分时间。P.I.D 调节(控制)参数的人工整定 经验参数和各种调节系统中P.I.D参数可参照以下经验数据设置。
pid三个参数的调整方法如下。响应缓慢,可增大Kp。快速振荡,可减小Kp。超调大,波动漫,可增大Ti。负载波动时,静差大,回复慢,可增大Kp。负载波动时,静差大,回复慢,可减小Ti。
调节方法:现场凑试法:温度PID确定一个调节器的参数值PB和Ti,通过改变给定值对控制系统施加扰动,现场观察判断控制曲线形状。
死区。死区在PID调节是一个非常重要的量,可以人为地增加控制回路的稳定性,设置好死区甚至可以减少大量的调整过程。通俗的理解死区就是你所能接受的最大偏差。死区的大小一般要大于反馈值的波动范围。
确定比例系数Kp确定比例系数Kp时,首先去掉PID的积分项和微分项,可以令Ti=0、Td=0,使之成为纯比例调节。
如果加进积分和微分作用,可按表3-4-2给出经验公式进行计算。若按这种方式整定的参数作适当的调整。对有些控制对象,控制过程进行较快,难以从记录曲线上找出衰减比。
pid怎么调节
1、P.I.D 调节(控制)参数的人工整定 经验参数和各种调节系统中P.I.D参数可参照以下经验数据设置。
2、pid三个参数的调整方法如下。响应缓慢,可增大Kp。快速振荡,可减小Kp。超调大,波动漫,可增大Ti。负载波动时,静差大,回复慢,可增大Kp。负载波动时,静差大,回复慢,可减小Ti。
3、调节方法:现场凑试法:温度PID确定一个调节器的参数值PB和Ti,通过改变给定值对控制系统施加扰动,现场观察判断控制曲线形状。
4、死区。死区在PID调节是一个非常重要的量,可以人为地增加控制回路的稳定性,设置好死区甚至可以减少大量的调整过程。通俗的理解死区就是你所能接受的最大偏差。死区的大小一般要大于反馈值的波动范围。
PID参数怎样调整最佳?
1、加大比例度或积分时间。P.I.D 调节(控制)参数的人工整定 经验参数和各种调节系统中P.I.D参数可参照以下经验数据设置。
2、PID控制器参数选择的方法很多,例如试凑法、临界比例度法、扩充临界比例度法等。但是,对于PID控制而言,参数的选择始终是一件非常烦杂的工作,需要经过不断的调整才能得到较为满意的控制效果。
3、pid三个参数的调整方法如下。响应缓慢,可增大Kp。快速振荡,可减小Kp。超调大,波动漫,可增大Ti。负载波动时,静差大,回复慢,可增大Kp。负载波动时,静差大,回复慢,可减小Ti。
到此,以上就是小编对于怎么调pl1和pl2的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏