本篇目录:
- 1、电机控制中,PID的计算值和PWM控制的占空比
- 2、pid输出值与占空比转换问题求助
- 3、PID输出PWM占空比总是长时间连续的100%或者0%该怎么调节参数?
- 4、直流电机的PID反馈,得到的Uk如何来控制其占空比?
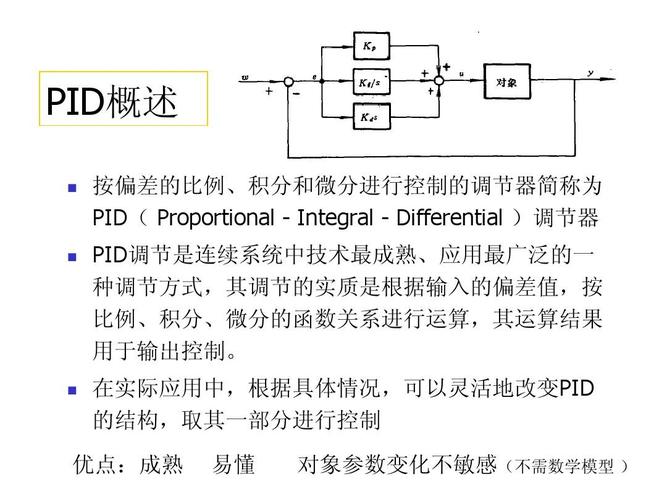
电机控制中,PID的计算值和PWM控制的占空比
1、占空比的计算公式为:占空比=(高电平时间/一个周期时间)*100%。其中,高电平时间指的是PWM信号中高电平的持续时间,一个周期时间指的是PWM信号一个完整的周期所需要的时间。
2、PWM占空比的计算公式为: 占空比=高电平时间/周期时间×100%。占空比常用以百分比形式表示,通常用符号D来表示。它的计算公式为:D=t/T×100%。其中,t代表信号处于有效状态的时间长度,T代表一个周期的总时长。
-图1")
3、最适中的解决办法 就是 从实际(项目应用)出发,PID的计算结果X,从而引起 PWM 100%输出的时候。相反 PID的计算结果Y,从而引起 PWM 0%输出的时候。
4、通常用百分比来表示,比如50%的占空比表示高电平和低电平时间相等。PWM技术的应用 PWM技术广泛应用于电子设备中,比如电机控制、LED调光、音频放大器等。通过改变PWM信号的占空比,可以控制设备的输出功率、亮度、音量等。
5、- PID控制:PID控制适用于需要精确控制和稳定性的应用,例如温度控制、位置控制、速度控制等。它通过根据实际值与期望值的误差来进行调整,以使系统保持在期望状态。
-图2")
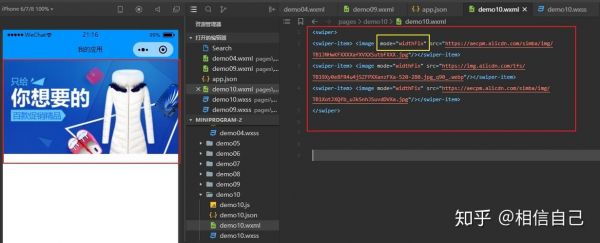
pid输出值与占空比转换问题求助
1、最适中的解决办法 就是 从实际(项目应用)出发,PID的计算结果X,从而引起 PWM 100%输出的时候。相反 PID的计算结果Y,从而引起 PWM 0%输出的时候。
2、由于定时器的数值属于整数格式,不能直接与PID的输出值比较,因此,必须将PID的输出值转换成整数(或将定时器值转换成浮点数)。浮点数与整数的转换有相应的指令可用。
3、PID的数字量输出表示用一个开关量的PWM作为输出值,PWM是占空比变化、周期固定的脉冲输出,因此这个周期就是指PWM的固定周期。
-图3")
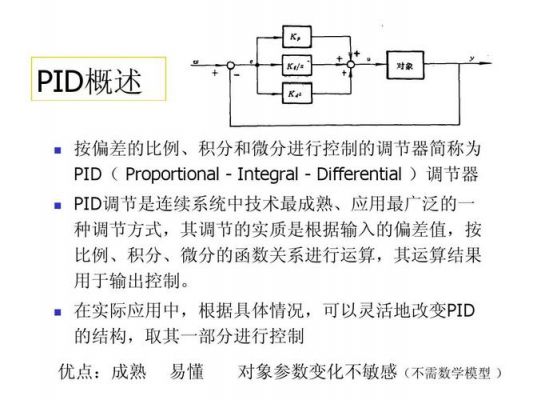
PID输出PWM占空比总是长时间连续的100%或者0%该怎么调节参数?
最适中的解决办法 就是 从实际(项目应用)出发,PID的计算结果X,从而引起 PWM 100%输出的时候。相反 PID的计算结果Y,从而引起 PWM 0%输出的时候。
在PWM波频率一定的条件下,通过改变其占空比的大小,来实现电压的调节。比如占空比为100%时,输出全电压,占空比为0时,输出电压为0。比如总的输出是30V,那么输出2-22V对应的占空比为2/30--22/30,即占空比约为7%--73%。
c.在输出不振荡时,增大微分时间常数Td。2.一般步骤 a.确定比例增益P 确定比例增益P 时,首先去掉PID的积分项和微分项,一般是令Ti=0、Td=0(具体见PID的参数设定说明),使PID为纯比例调节。
直流电机的PID反馈,得到的Uk如何来控制其占空比?
1、PID的计算增量指控制输入,在这里就是PWM信号的占空比。而控制输出就是电机的转速或其它(通过采样驱动电流和目标电流来的到控制的差值)。
2、如果不是非常精确的PID调节,大可以用简化的PID算法公式来计算,既然查过很多资料这里就不再说了。用单片机的话,尽量减少运算量,尤其是乘除法,可以选择查表法配合计算,这样可以块很多。
3、PID=Uk+KP*【E(k)-E(k-1)】+KI*E(k)+KD*【E(k)-2E(k-1)+E(k-2)】PID算法具体分两种:一种是位置式的 ,一种是增量式的。
4、在具体实施中,可以用定时器作为斜波发生器;定时值与脉宽数值比较并控制输出触点,在该触点上就能得到相应的占空比输出。脉冲周期的选定没有定论,都是根据对象的特性决定的。
5、直流电机速度是由功率大小控制的,所以,它是由占空比决定的(当然,也要控制频率跟上)。相关知识:电机和减速器的扭矩(N·m)= 电机功率(W)/(2 * π * 转速/60)。
6、电机调速与pwm占空比对应的速度是0~max,对应占空比的0~1;pwm脉冲宽度调制是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。
到此,以上就是小编对于pid调节比例度最大多少的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏