本篇目录:
单片机的旋转编码编程
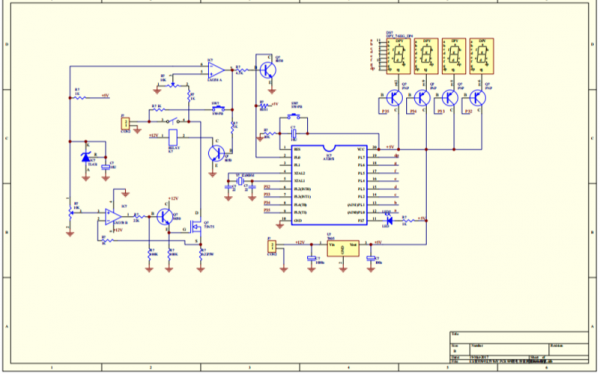
旋转编码器通常由两个部分组成:旋转部分和固定部分。旋转部分包括一个旋转轴和一个旋转盘,旋转盘上有一些刻度线。固定部分包括一个光电传感器和一个固定盘,固定盘上也有一些刻度线。
一般旋转编码器都是5线/7线。5线的话,一根电源、一根地、A相、B相、Z信号各一根。7线的话,A、B相信号是差分信号。这种电路板安装的旋转编码器,总共有A、B、C三端。引脚从左向右数分别对应A、C、B。
-图1")
所以,在单片机编程时只需要判断当输出1 为高电平时,输出2 当时的状态就可以判断出是左 旋转或是右旋转了。还有另外一种3 脚的,除了不带按钮开关外,和上面是一样的使用。
使计数更可靠,二来可以保护单片机(至多烧坏一片7414)。旋转编码器一般输出3路信号ABZ,AB相位差是90° 将A接到中断。当A下降沿时:B为高就是正转一步,B为低则是反转一步。转速可以用若干步用的时间进行计算。
单片机旋转模拟时钟程序怎么编?
电机方面保证角速度为360每20mS以上。与旋转指针的电刷结构设计。有一个外部中断(电刷位置即可采到)来定位零点或某个参考角度。采用串行移位刷LED,可以节省电刷引脚数目。时钟画面提取,用数学库计算得到。
-图2")
采用磁感应技术:a)、找一个双E形高频变压器磁芯,两个E形的分别装在定子和转子中心的转轴上,并使其缺口对准并在保证不相碰的情况下尽可能减小其距离。
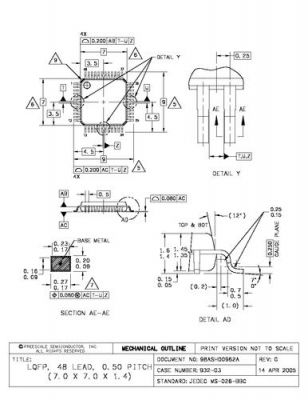
重不重是相对的,要看你的驱动机构的驱动能力,再就是重心要在轴线上,且质量要尽量靠近轴心,以减少转动惯量。贴片的芯片会轻很多,一般功耗也小,例如8051F系列的,而且带有内部时钟,可以省去晶振,当然精度不如晶振高。
用到哪一款你可以下载相应的PDF文档自己看一下。我现在用的STC12C5410AD,内部带一个10位精度的AD,flash程序空间10K。
-图3")
这是我初学时写的,刚好也是数码管 /*位选接P2口,三个按钮分别接P25~P27。
51单片机如何模拟旋转编码器输出的相位差90度的方波
1、这种编码器的输出方式为长线驱动(linedriver),其中A+A-B+B-Z+Z-为输出的信号线,增量编码器给出两相方波,它们的相位差90°(电气上),通常称为A通道和B通道。
2、方波经过积分器后变成相位滞后90°的三角波。三角波再经过滞回比较器可以得到方波。
3、确定单片机的IO口。在51单片机中,有多个IO口可以用来读取旋转编码器的输出信号。需要根据实际情况选择一个合适的IO口。 确定IO口的工作模式。
4、几十个到几千个都有),和供电电压等。单路输出是指旋转编码器的输出是一组脉冲,而双路输出的旋转编码器输出两组A/B相位差90度的脉冲,通过这两组脉冲不仅可以测量转速,还可以判断旋转的方向。
5、如果需要高速(速度比较快)计数,在单片机外面加一个判向电路。做硬件判向。输出一般有两种,一种是输出一个方向信号和一个计数信号。用单片机的一个计数器(如用T0),这样就能实现正反两方向的加减计数。
6、因为编码器输出的是标准的方波,所以可以使用单片机(STM32\STM851等)直接读取。在软件中的处理方法是分两种,自带编码器接口的单片机如STM32,可以直接使用硬件计数。
急求51单片机控制舵机C语言程序,舵机可以根据设定旋转任意角度!急求...
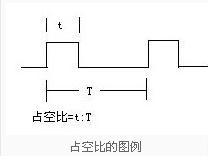
1、定时器0表示的是脉冲总周期20ms,定时器1表示的是正脉冲宽度(如pwm_value = 1500时表示正脉冲宽度为5ms), 而while循序只是为了改变正脉冲宽度。
2、单片机系统实现对舵机输出转角的控制,必须首先完成两项任务:首先,产生基本的PWM周期信号,即产生20ms的周期信号;其次,调整脉宽,即单片机调节PWM信号的占空比。
3、操作步骤:1 单片机,舵机,电源共地;2 用两个稳压芯片进行供电,将电源分开来;3 舵机信号端没有直接连接单片机IO口,我串了一个10K的电阻,也就是这一步之后就可以控制舵机。
4、你的舵机是什么型号的,驱动芯片呢?如果是像飞思卡尔上用的舵机的话只要改变PWm波的占空比就行了。不同信号的是不同的。
5、这样就 产生了PWM波 定义一个变量,主程序检测按键,根据按键按下次数改变变量的值,再根据变量值决定定时器1的初值,即可改变PWM占空比,从而改变舵机角度 当然你要计算出舵机每转一度,PWM波的占空比应该变化多少。
到此,以上就是小编对于单片机怎么切换到另一个循环的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏