本篇目录:
- 1、pid输出模拟量怎么转化成50hz
- 2、模拟PID控制与数字PID控制的区别
- 3、如何利用PID调节器,横河液位计,开关阀门,来模拟补水液位控制
- 4、台达plc的PID指令输出MV怎么转模拟量?
- 5、如何用matlab软件模拟pid控制经验试凑法
- 6、如何采用模拟电路实现PID控制?
pid输出模拟量怎么转化成50hz
可以用模拟量输出模块输出个0-10V的电压,然后再把这个0-10V的电压接到变频器的输入装置上,变频器根据这个0-10V的电压来输出0-50HZ的频率,从而调节电机的转速,你还可以上技成论坛或中华工控论坛去找更加详尽的
pid输出的是一个模拟量值,你把输出的模拟量4-20ma或者0-10v接到变频器上不就行了,把最小频率设置为30hz,最大频率为50hz。
-图1")
PID输出的是一个模拟量值,把输出的模拟量4-20mA或者0-10V接到变频器上不就行。把最小频率设置为30Hz,最大频率为50Hz。可编程逻辑控制器。如果输出指示灯正常输出没有反应,再检查输出口外围线路是否正常。
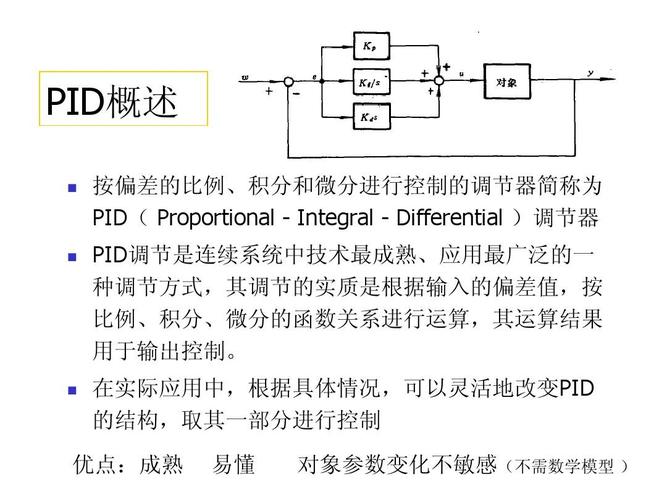
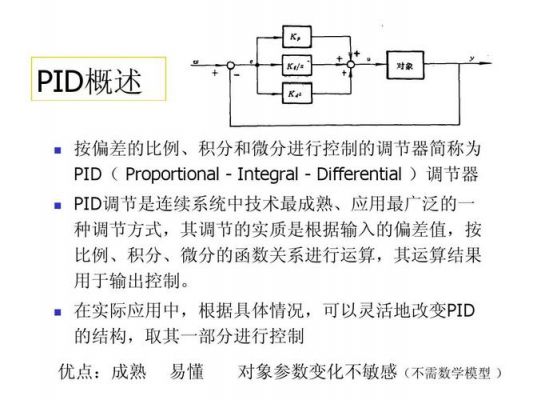
模拟PID控制与数字PID控制的区别
模拟PID用模拟量作为控制的输入和输出量,数字PID用数字量作为控制的输入和输出量。
数字PID就是把现场的控制变量的模拟信号和对现场受控变量的输出信号均转换成了数字信号,PID的实现也是通过数字信号的设定来完成的。现在大多在DCS、PLC系统内完成的。
-图2")
模拟控制是需要模拟器件完成的,是早期的PID控制。随着处理器芯片的运算速度不断提升,更多的PID采用数字控制。
PI,PD,PID系统的适用范围,不同的控制策略适用于不同的控制系统,对于PID策略,用户也可仅使用其中一部分功能或所有参数来控制不同的系统,例如可以使用PD调节器来调节大滞后环节。
PID 是闭环控制系统的比例-积分-微分控制算法。PID 控制器根据设定值(给定)与被控对象的实际值(反馈)的差值,按照 PID 算法 计算出控制器的输出量,控制执行机构去影响被控对象的变化。
-图3")
无塔供水器的操作非常简单,因为无塔供水器全部都是使用全自动进行控制的,并且是使用PID进行调节,同时可以通过键盘进行操作,另外还会配有人机界面,而人机界面上则会配有文本、数字。
如何利用PID调节器,横河液位计,开关阀门,来模拟补水液位控制
你好!液位控制不需要PID,因为这是浪费。当然了,利用PID调节器,横河液位计,开关阀门,来模拟补水液位控制,另当别论。
可以选择NHR系列PID调节器,将液位计信号接入仪表,并在仪表内设置液位目标值,仪表会根据实际液位和目标液位输出控制信号来调节电磁阀的开关。
三个液位开关控制开关分别安装在3个水箱上,液位开关各控制一个中间继电器,通过继电器控制水泵接触器。
有以下几种方法。最简单控制就是在进水口装浮球阀,控制水不溢出,人工控制泵的启停。简单高水位,泵起;低水位泵停。在水箱内安装高、低探头外装一控制箱,与泵连接。
台达plc的PID指令输出MV怎么转模拟量?
这个是数字量,比如温度控制,通过控制周期输出时间的长短调节温度,规定周期为1s,指令就会调节这1s中通断的比例,来控温。而且你用设置向导也能看到,设置的输出装置都是Y、M、S的数字量。望采纳。
有误差看看是不是模拟量有问题。模拟量范围值是0-10000对应0-10V,PID输出MV值,怎么换算成0-10000的数值,这就是MV值如果是10000,输出的电压就是10V,如果是1000,电压就是1V。
An——模拟量输入信号的最大值;A0——模拟量输入信号的最小值;Dm——Am经A/D转换得到的数值;D0——A0经A/D转换得到的数值;A——模拟量信号值;D——A经A/D转换得到的数值。
楼主你好 台达的模拟量模块我用的到不少 但是你这个自带模拟输出的还没用过,但是看了你的程序,觉得应该是你的数据类型出了问题。好像这款PLC自带的模拟量功能的精度不高,按理说应该不会允许D1116里面精确到小数。
如何用matlab软件模拟pid控制经验试凑法
(1)对于PID 参数采用MATLAB 进行整定和仿真,使用起来不仅快捷、方便,而且更为直观,同时也避免了传统方法反复修改参数调试。
打开matlab2009,新建一个模型文件。点击“开始”-Simulink-“Library Browser”,打开simulink库。在“Simulink Library Browser”的库列表中找到“Simulink Extras”,点击右侧的“Additional Linear”。
基于MATLAB下的PID控制仿真【摘要】自动化控制的参数的定值控制系统多采用P、I、D的组合控制。
如何采用模拟电路实现PID控制?
这是点动启动混合电路,给你一个电路图按此接线即可。图中SB3是点动按钮,SB2是正常启动运行按钮。
PID=Uk+KP*【E(k)-E(k-1)】+KI*E(k)+KD*【E(k)-2E(k-1)+E(k-2)】PID算法具体分两种:一种是位置式的 ,一种是增量式的。
PID参数自整定控制仪可选择外给定(或阀位)控制功能。可取代伺服放大器直接驱动执行机构(如阀门等)。可实现自动/手动无扰动切换。手动切换至自动时,采用逼近法计算,以实现手动/自动的平稳切换。
到此,以上就是小编对于模拟pid调节的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏