本篇目录:
科普:无人机通过什么方式实现远程控制和数据传输
1、无人机工作原理是是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。
2、不同级别的无人机,链路是不大一样的。但大致上脱不出点对点通信和依数据链两种方式。使用点对点链路的无人机,大抵都是手持级别 or 中型的。
-图1")
3、有的通过无线(wifi)、有的通过无线电波 4G比较通用,防干扰比较好,固定翼或直升机都可以使用,特别是航模比赛或者模友聚会切磋时,应该选用4G。72MHz也比较通用,FPV公认的遥控器,固定翼或直升机均可。
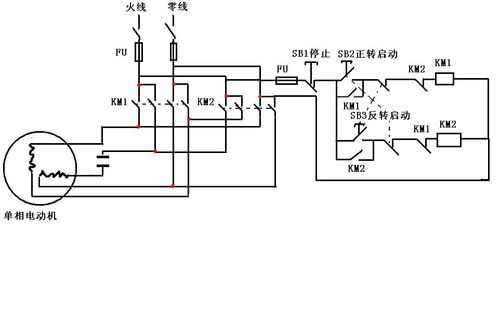
西门子变频器与电机的自整定怎么做,步骤在说明书里有吗?
连接电源线和电机线:将变频器的电源线和电机线分别连接到电源和电机上,确保连接牢固。设置变频器参数:根据3kW电机的额定电流和额定转速等参数,设置变频器的相关参数,包括电压、频率、电流、转速等。
变频器自整定:通过这种自动的优化辨识,在变频器的CPU里建立一个精准的电机数学模型。有了这个模型,变频器对电机的控制特性会大大的提高。以确保电机的高性能运转以及高精度的控制。
-图2")
这个要看具体品牌、型号的变频器,有的变频器有自整定功能如西门子MM440,有的则没有自整定功能如台达的变频器。具体的看说明书,很简单的。
变频器调节的方法:通过手动方式,查看手册,调整变频器频率设置参数。通过通讯联网远程自动调整。手动调整:操作面板按钮或旋钮,外接电位器。
变频器参数如何设定?变频器参数设定步骤? 变频器的设定参数较多,每个参数均有一定的选择范围,使用中常常遇到因个别参数设置不当,导致变频器不能正常工作的现象,因此,必须对相关的参数进行正确的设定。
-图3")
单片机如何与电机相连接
电路图接法:ULN2003是大电流驱动阵列,多用于单片机、智能仪表、PLC、数字量输出卡等控制电路中。可直接驱动继电器等负载。输入5VTTL电平,输出可达500mA/50V。ULN2003是高耐压、大电流达林顿系列,由七个硅NPN达林顿管组成。
⑸EN+:电机脱机控制正端。⑹EN-:电机脱机控制负端。电机绕组连接:⑴A+:连接电机绕组A+相。⑵A-:连接电机绕组A-相。⑶B+:连接电机绕组B+相。⑷B-:连接电机绕组B-相。
要通过步进电机驱动模块来连接,单片机IO不足以驱动电机,如果是小型的4相5线步进电机的话可以用ULN2003驱动用到4个IO,如果是大功率的步进电机的话需要大功率的驱动模块这时控制方式也会改变(通过脉冲控制)。
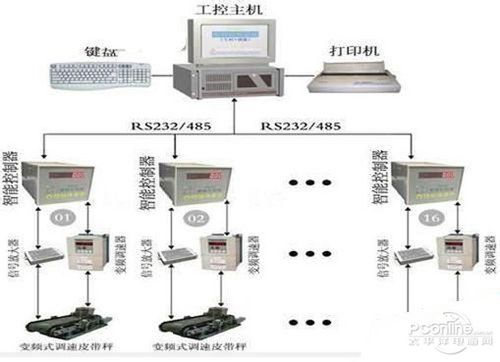
怎样将伺服电机编码器信息传给上位机
在速度模式下,伺服系统本身没办法做定位,如果想要实现定位功能,需要将电机的位置信号或者是负载的位置信号反馈给上位机,然后再由上位机进行运算控制,说白了就是:需要另外检测电机或者负载的位置。
建议使用通讯,很多伺服驱动器都是带485通讯了,并且可以读取到电机的编码器位置。 你可以百度下我的名字,或者选择别的品牌。
确定编码器类型:伺服电机编码器分为绝对编码器和增量编码器两种类型。绝对编码器可以直接读取电机的位置信息,而增量编码器需要通过计算来确定电机的位置。
你好!伺服电机的工作信号一般有两个一个,一个是启动信号,一个是速度给定或转矩给定信号,由编码器测量速度偏差,靠偏差纠偏,给定信号由上位机给。如有疑问,请追问。
如果对电机的速度、位置都没有要求只要输出一个恒转矩当然是用转矩模式。 如果对位置和速度有一定的精度要求而对实时转矩不是很关心用转矩模式不太方便用速度或位置模式比较好。
到此,以上就是小编对于mpi转modbus的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏