本篇目录:
slam怎么读
1、slam怎么读语音: 英音[slm] 美音[slm]。
2、off (slam)滚:动 (翻转;滚动) roll;turn round;trundle 球滚到桌子下面去了。The ball rolled under the table.动 (走开;离开) get away;beat it 滚开 scram;get out 动 (液体沸腾) boil 锅里汤滚了。
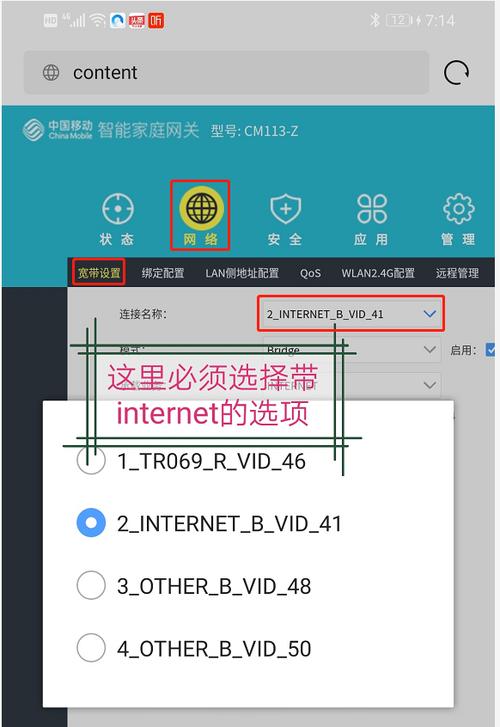
-图1")
3、这一部分将介绍与篮球比赛中的动作和技巧相关的词汇,例如dribble(运球)、layup(上篮)以及slam dunk(扣篮)等。
4、读音:英[let],美[let]翻译:adj.迟的;晚的;末期的;最近的;已故的 adv.晚;迟 例句:Im afraid I may be a little late.恐怕我可能稍晚一点。
5、首先搬出宝典:Multiple View Geometry in Computer Vision。这本书基本涵盖了Vision-based SLAM这个领域的全部理论基础!读多少遍都不算多!另外建议配合Berkeley的课件学习。
-图2")
6、①所在位置;②目的地;③通过,即移动到某处,然后又离开。behind作“留于身后”“走后留下”解时常与leave、stay、remain等动词连用;作“当某人已通过……之后”解时常与bolt、cling、close、shut、slam等动词连用。
如何通过视觉SLAM构建得到的三维地图进行机器人的路径规划
首先眼睛要搜集环境信息,把看到的环境状态反馈给大脑,然后大脑根据眼睛反馈回来的环境信息和所要到达的目的地做出综合的分析,得到一个判断和结果,然后指挥人的身体移动,从而实现在环境中的行走。
激光测距导航定位规划 激光测距导航定位规划是扫地机器人规划线路的方式之一,具体指的是机器人发车激光扫描自身到边界的每个距离并生成数字地图,之后根据机器人自身的算法构建房间定图进行实时定位清扫。
-图3")
其次,视觉定位相机可以用于环境建模。通过连续采集环境中的图像信息,视觉定位相机可以生成三维环境地图,包括物体的位置、大小、形状等信息,为机器人或无人车的导航和路径规划提供依据。
机器学习在slam中有哪些应用
它的应用也很广泛,主要针对产生庞大数据的活动,比如销售预测,库存管理,石油和天然气勘探,以及公告卫生等。3 自然语言处理。它是指计算机能够像人类一样拥有文本的处理能力。
算法基础课程:人工神经网络,支持向量机,遗传算法等,还有各个领域需要的算法,比如你要让机器人自己在位置环境导航和建图就需要研究SLAM。
最近有一项研究关于NBA篮球赛,可从视频中分析出要进行大动作的焦点人物。计算机视觉中,会用到一些传统的图像处理方法,不过越来越多的计算机视觉研究基于机器学习和深度学习。
激光slam定位时怎么通过ros发布初始位置
SLAM需要机器人在未知的环境中逐步建立起地图,然后根据地区确定自身位置,从而进一步定位。ROS系统通常由大量节点组成,其中任何一个节点均可以通过发布/订阅的方式与其他节点进行通信。
在数据处理阶段,激光雷达会把已经采集到的数据发送到计算机进行处理。然后通过SLAM算法,提取数据中的特征并建立地图,同时对机器人的位置进行估计。
地图建模。SLAM可以辅助机器人执行路径规划、自主探索、导航等任务。
slam slam就是 同步定位与建图(Simultaneous Localization and Mapping)。指机器人通过根据自身位置和地图实现自主定位和导航。
到此,以上就是小编对于slam技巧的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏