本篇目录:
- 1、怎么使硬件pid变快
- 2、PID是什么控制方法,怎么控制系统的?
- 3、如何对PID实现同步控制,什么样可以实现呢?
- 4、PID控制器是如何实现的
- 5、pid控制是什么意思
- 6、PID控制的原理是什么?
怎么使硬件pid变快
变频器pid反应慢可通过以下方式调试:响应快慢以及控制稳定性都需要根据控制要求调节参数。偏差较多需要快速响应时可采用乒乓控制,暂时切断PID输出,等偏差到了合适范围再切入PID调节。温度控制系统,增加微分。
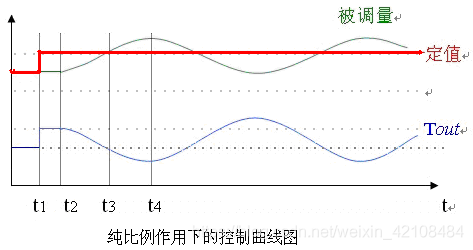
确定比例增益。P确定比例增益P时,首先去掉PID的积分项和微分项,一般是令Ti=0、Td=0,PID为纯比例调节。输入设定为系统允许的最大值的60%~70%,由0逐渐加大比例增益P,直至系统出现振荡。
-图1")
去掉pid的积分项,还有微分项使pi d为纯比例的输出,然后逐渐增大比例增益p,直到系统出现振荡消失,调试完成,然后开始确定积分的时间常数,设定较大的初值逐渐减少,直至系统出现震荡,之后反过来,直到系统的震荡消失。
PID是什么控制方法,怎么控制系统的?
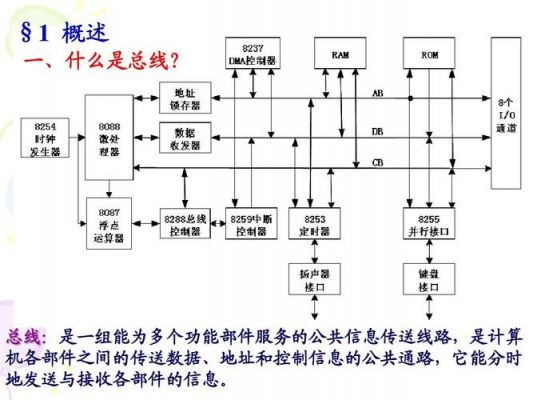
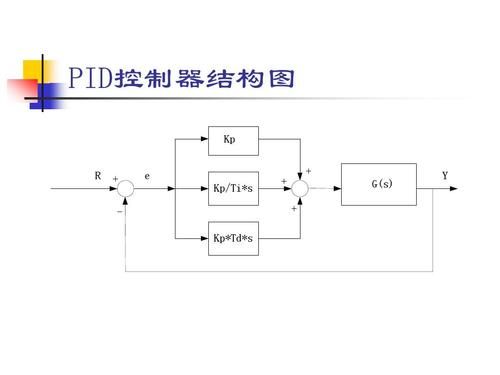
P是指比例控来制,也称比例增益。比例控制是按比例输出简单控制方式,但当仅有比例控制时自,系统存在稳差,且无法完全消除外界所加入的固定扰动。I是指积分控制。积分控制主要目的在于消除稳态误差。D为差速控制。
P是指比例控来制,也称比例增益。比例控制是按比例输出简单控制方式,但当仅有比例控制时自,系统存在稳差,且无法完全消除外界所加入的固定扰动。I是指积分控制。积分控制主要目的在于消除稳态误差。
-图2")
PID是比例、积分和微分三部分作用的叠加的复合控制。特点:在比例作用的基础上能提高系统的稳定性,加上积分作用能消除余差,又有δ、TI、TD三个可以调整的参数,因而可以使系统获得较高的控制质量。
如何对PID实现同步控制,什么样可以实现呢?
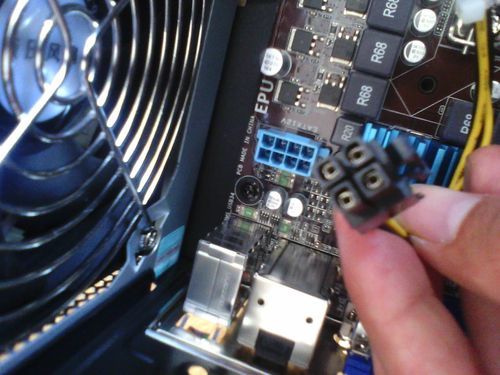
1、使用PID过程控制模块。这种模块的PID控制程序是PLC生产厂家设计的,并存放在模块中,用户在使用时只需要设置一些参数,使用起来非常方便,一块模块可以控制几路甚至几十路闭环回路。
2、通过摆杆反馈的位置信号实现同步控制。收线控制采用实时计算的实际卷径值,通过卷径的变化修正PID前馈量,可以使整个系统准确、稳定运行。PID控制器就是根据系统的误差,利用比例、 积分、微分计算出控制量进行控制。
-图3")
3、PID控制通过对比例、积分、微分三个控制参数的合理调节,可以实现对被控变量的精确控制和稳定控制。
PID控制器是如何实现的
PID控制的基本原理包括比例控制、积分控制和微分控制。比例控制(P控制)比例控制是根据实际输出值与预期输出值之间的误差信号,按比例调整控制输出值,以实现对控制精度的提高。
通过摆杆反馈的位置信号实现同步控制。收线控制采用实时计算的实际卷径值,通过卷径的变化修正PID前馈量,可以使整个系统准确、稳定运行。PID控制器就是根据系统的误差,利用比例、 积分、微分计算出控制量进行控制。
PID控制器的工作原理是,首先通过检测系统的输出和预期的目标,计算出误差(error)。
在常规PID控制器中,微分作用的输出变化与微分时间和偏差变化的速度成比例,而与偏差的大小无关,偏差变化的速度越大,微分时间越长,则微分作用的输出变化越大。
当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。
pid控制是什么意思
PID控制是一种常见的控制方法,它通过对被控系统的反馈信号进行分析和处理,从而实现对被控变量的稳定控制。PID控制中的P、I、D分别代表比例、积分、微分三个控制参数。
PID是比例,积分,微分的缩写.1 比例调节作用:是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。
在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。PID控制,实际中也有PI和PD控制。PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。
I是指积分控制。积分控制主要目的在于消除稳态误差。D为差速控制。在微分控制中,控制器输出与输入误差信号的导数与误差的变化率成正比。差速控制的目的是消除温度的大波动1。PID操作是一个重复的采样周期。
工程控制和数学物理方面 PID:一个数学物理术语。PID由8位端口优先级加端口号组成,端口号占低位,默认端口号优先级128。
数字电视复用系统名词 PID(Packet Identifier) 在数字电视复用系统中它的作用好比一份文件的文件名,我们可以称它为“标志码传输包” 。
PID控制的原理是什么?
PID是比例、积分和微分三部分作用的叠加的复合控制。特点:在比例作用的基础上能提高系统的稳定性,加上积分作用能消除余差,又有δ、TI、TD三个可以调整的参数,因而可以使系统获得较高的控制质量。
PID控制的基本原理包括比例控制、积分控制和微分控制。比例控制(P控制)比例控制是根据实际输出值与预期输出值之间的误差信号,按比例调整控制输出值,以实现对控制精度的提高。
进行一次PID运算就是一复次采样周期。PID控制的采样时间就是每隔多长时间进行一次PID运算,并将结果输出。
PID的原理是:通过摆杆反馈的位置信号实现同步控制。收线控制采用实时计算的实际卷径值,通过卷径的变化修正PID前馈量,可以使整个系统准确、稳定运行。
微分参数(Kd)是控制器对系统输出变化的反应。它可以提高系统的精确度,但如果调节过大,则可能导致系统的不稳定。PID控制器的工作原理是,首先通过检测系统的输出和预期的目标,计算出误差(error)。
到此,以上就是小编对于pcs7 pid控制说明的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏