本篇目录:
机器人传感器的主要性能指标有
1、机器人传感器性能主要指标主要有:灵敏度、使用频率范围、动态范围、相移。机器人传感器要保证测量精度,传感器必须工作在非饱和区和线性段,而过高的灵敏度会影响其适用的测量范围。
2、线性度:指传感器输出量与输入量之间的实际关系曲线偏离拟合直线的程度。定义为在全量程范围内实际特性曲线与拟合直线之间的最大偏差值与满量程输出值之比。灵敏度:灵敏度是传感器静态特性的一个重要指标。
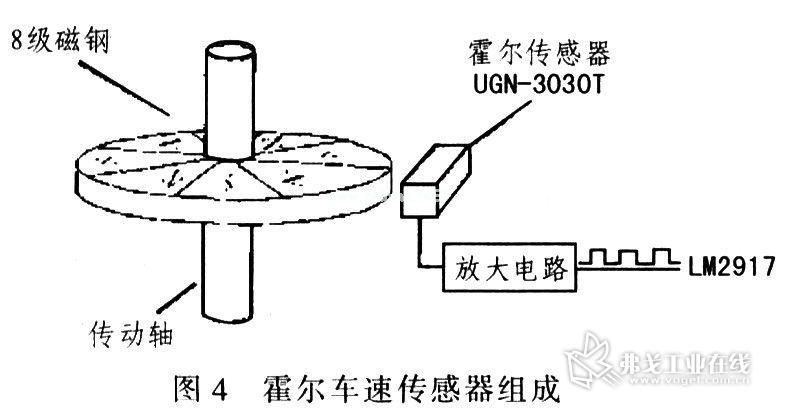
-图1")
3、速度和加速度等运动信息。环境传感器:如温度传感器、湿度传感器、气体传感器等,用于检测环境中的温度、湿度、气压和气体浓度等信息。以上是机器人传感器主要检测的信息类型,这些信息可为机器人的自主决策和行动提供支持。
4、线性度 通常情况下,传感器的实际静态特性输出是条曲线而非直线。在实际工作中,为使仪表具有均匀刻度的读数,常用一条拟合直线近似地代表实际的特性曲线,线性度(非线性误差)就是这个近似程度的一个性能指标。
传感器动态特性的主要技术指标有哪些
1、静态特性:静态特性是指检测系统的输入为不随时间变化的恒定信号时,系统的输出与输入之间的关系。主要包括线性度、灵敏度、迟滞、重复性、漂移等。
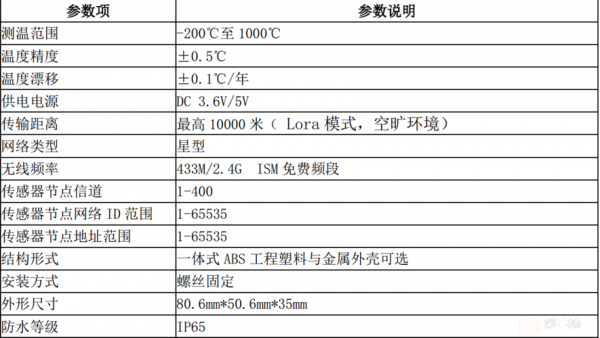
-图2")
2、传感器技术指标主要看灵敏度、频率、线性范围、稳定性和精度。灵敏度 灵敏度高时,与被测量变化对应的输出信号的值才比较大,有利于信号处理。
3、属于传感器动态特性指标的一般是指灵敏度。灵敏度是指传感器在稳态工作情况下输出量变化△y对输入量变化△x的比值,即输出一输入特性曲线的斜率。如果传感器的输出和输入之间显线性关系,则灵敏度S是一个常数。
传感器的性能
1、传感器静态 传感器的静态特性是指对静态的输入信号,传感器的输出量与输入量之间所具有相互关系。表征传感器静态特性的主要参数有:线性度、灵敏度、迟滞、重复性、漂移等。
-图3")
2、传感器的性能指标 在检测控制系统和科学实验中,需要对各种参数进行检测和控制,而要达到比较优良的控制性能,则必须要求传感器能够感测被测量的变化并且不失真地将其转换为相应的电量,这种要求主要取决于传感器的基本特性。
3、性能指标:线性度、灵敏度、迟滞、重复性、漂移、测量范围、精度、分辨率、阈值、稳定性等等。下面选几个参数做下介绍:线性度:指传感器输出量与输入量之间的实际关系曲线偏离拟合直线的程度。
传感器的性能指标是哪三种?
1、性能指标:线性度、灵敏度、迟滞、重复性、漂移、测量范围、精度、分辨率、阈值、稳定性等等。下面选几个参数做下介绍:线性度:指传感器输出量与输入量之间的实际关系曲线偏离拟合直线的程度。
2、线性度:指传感器输出量与输入量之间的实际关系曲线偏离理论拟合直线的程度。也可以理解为非线性误差,通常用相对误差表示其大小。灵敏度:指传感器在稳态下,输出增量与输入增量的比值。
3、线性度、灵敏度、迟滞、重复性、频域响应性能指标。根据查询360文库PPT可知,传感器的性能指标分为静态特性和动态特性。静态特性指标为测量范围与量程、线性度、灵敏度、迟滞、重复性。而动态特性为频域响应性能指标。
4、根据查询与非网显示,机器人传感器的主要性能指标包括灵敏度、分辨率、鲁棒性、响应时间。
5、传感器技术指标主要看灵敏度、频率、线性范围、稳定性和精度。灵敏度 灵敏度高时,与被测量变化对应的输出信号的值才比较大,有利于信号处理。
6、传感器的一般特性包含的指标如下:灵敏度、响应特性、线性范围、稳定性、重复性、漂移、精度、分辨(力)、迟滞。
到此,以上就是小编对于传感器性能要求的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏