本篇目录:
太阳能电池pid是什么意思
1、光伏pid是potentialInducedDegradation,潜在电势诱导衰减,是光伏电池板的一种特性,指在高温多湿环境下,高电压流经太阳能电池单元便会导致输出下降的现象。
2、光伏组件的PID(Potential Induced Degradation)效应,是指组件在长时间工作后性能会逐渐衰减的一种情况。
-图1")
3、Potential Induced Degradation,PID,即电势诱发衰减 效应,是一种太阳能电池在实际使用中由于上面加高强度负电压而使器件性能降低的现象,引起衰减的机理被称之为电势诱发衰减。
4、pid作用是进程编号。PID就是各进程的身份标识,程序一运行系统就会自动分配给进程一个独一无二的PID。进程中止后PID被系统回收,可能会被继续分配给新运行的程序。
5、pid效应效应是电池组件的封装材料和其上表面及下表面的材料,电池片与其接地金属边框之间的高电压作用下出现离子迁移,而造成组件性能衰减的现象。
-图2")
PID效应的危害有哪些?
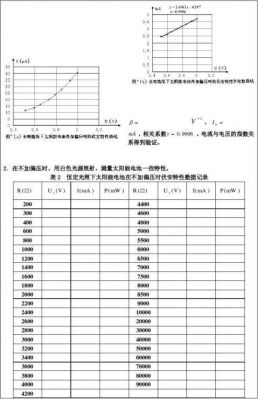
通过【组件PID效应测试前后的参数及I-V曲线对比】明显可以看出PID效应对太阳能电池组件的输出功率影响巨大,是光伏电站发电量的“恐怖杀手”。
PLD是作为一种通用集成电路产生的,它的逻辑功能按照用户对器件编程来确定。一般的PLD的集成度很高,足以满足设计一般的数字系统的需要。逆变器是把直流电能(电池、蓄电瓶)转变成交流电(一般为220v50HZ正弦或方波)。
光伏组件PID效应形成的原因主要有两类:原PN结电场情况改变,或存在其它的电流通道,造成实际流过PN结的光生电流减小;器件受到离子迁移的影响,材料性能发生了不可恢复的变化,和原始制造出的组件相比,输出功率变小。
-图3")
什么叫PID控制
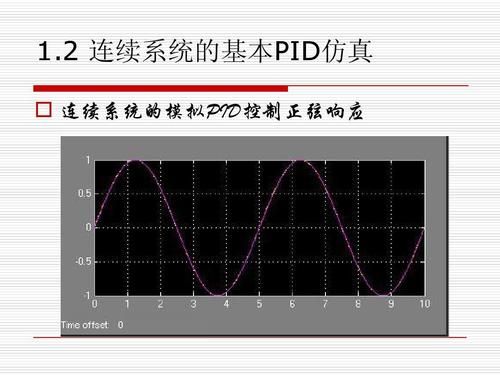
1、PID操作是一个重复的采样周期。PID控制采样时间是PID每次运行多长时间,并输出结果。
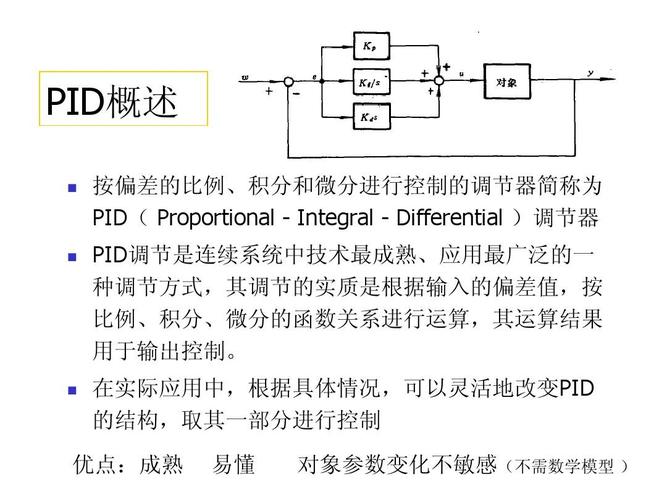
2、PID是比例、积分和微分三部分作用的叠加的复合控制。特点:在比例作用的基础上能提高系统的稳定性,加上积分作用能消除余差,又有δ、TI、TD三个可以调整的参数,因而可以使系统获得较高的控制质量。
3、PID控制是一种常见的控制方法,它通过对被控系统的反馈信号进行分析和处理,从而实现对被控变量的稳定控制。PID控制中的P、I、D分别代表比例、积分、微分三个控制参数。
4、PID(Process Identification)即进程识别号,也就是进程标识符。操作系统里每打开一个程序都会创建一个进程ID,即PID。
5、在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。PID控制,实际中也有PI和PD控制。PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。
运行中的光伏组件pid效应怎么发现
1、光伏组件PID效应形成的原因主要有两类:原PN结电场情况改变,或存在其它的电流通道,造成实际流过PN结的光生电流减小;器件受到离子迁移的影响,材料性能发生了不可恢复的变化,和原始制造出的组件相比,输出功率变小。
2、光伏组件的PID(Potential Induced Degradation)效应,是指组件在长时间工作后性能会逐渐衰减的一种情况。
3、在实际的应用场合,晶体硅光伏组件的PID现象已经被观察到,基于其电池结构和其他构成组件的材料以及设计形式的不同,PID现象可能是在其电路与金属接地边框成正向电压偏置的条件下发生,也可能是成反向偏置的条件下发生。
什么是太阳能组件PID
光伏pid是potentialInducedDegradation,潜在电势诱导衰减,是光伏电池板的一种特性,指在高温多湿环境下,高电压流经太阳能电池单元便会导致输出下降的现象。
光伏组件的PID(Potential Induced Degradation)效应,是指组件在长时间工作后性能会逐渐衰减的一种情况。
简单来说,就是光伏组件中的正离子会向接地的负电势处移动,从而使组件失效,影响发电量,并且在潮湿的环境下尤其明显。后来听说华为逆变器支持组件夜间修复,通过抬升整个组件的电势,减少正离子迁移,从而减缓组件的PID效应。
简述PID控制的特点
1、PID控制主要是控制的精度比较高,控制的温差比较小,温度波动很小。PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
2、PID是比例、积分和微分三部分作用的叠加的复合控制。特点:在比例作用的基础上能提高系统的稳定性,加上积分作用能消除余差,又有δ、TI、TD三个可以调整的参数,因而可以使系统获得较高的控制质量。
3、,可以提高系统的无差度,即提高系统的稳态控制精度。2,不足之处:积分调节的过渡过程变化相对缓慢,系统的稳定性变差,因此一般不单独使用,通常与比例调节配合(PI调节),且PI调节与单纯的比例调节相比稳定性相对变差。
4、有调节静差,适用于大滞后环节 PID调节器,兼顾PD调节器快速性,结合I调节器的无静差特点,达到比较高的调节质量,根据不同需求选用不同调节器,像电源中因为不能过压所以不会有D,都是PI调节器。
5、PID是比例,积分,微分的缩写.1 比例调节作用:是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。
6、偏差的比例(P)、积分(I)和微分(D)进行控制的PID控制器(亦称PID调节器)是应用最为广泛的一种自动控制器。
到此,以上就是小编对于组件pid测试原理的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏